



Wir verwenden Cookies, um Ihnen die optimale Nutzung unserer Webseite zu ermöglichen. Es werden für den Betrieb der Seite nur notwendige Cookies gesetzt. Details in unserer Datenschutzerklärung.
Datenschutzerklärung
Impressum

MultiRob im Einsatz. Bild: Bayerische Landesanstalt für Landwirtschaft
Ein Team von Forschern und Ingenieuren hat für Milchviehställe einen Roboter entwickelt, der sowohl Laufflächen als auch Liegeflächen reinigt und auch das Einstreuen übernimmt.
Autonom fahrende Spaltenroboter sind heute als Helfer aus vielen Milchviehställen nicht mehr wegzudenken. Unermüdlich reinigen sie die Laufflächen von Kuhställen. Das Ergebnis sind nicht nur saubere und trockene Böden, sondern auch gesündere Klauen bei den Kühen und eine bessere Luft im Stall. Darüber hinaus wird wertvolle Arbeitszeit eingespart, die zum Beispiel für die Beobachtung und Kontrolle der Kühe investiert werden kann.
Doch was bei der Reinigung der Stallböden bereits funktioniert, fehlte bislang bei der Pflege der Liegeboxen. Geräte, die alle Arbeitsschritte vereinen (Reinigen der Laufflächen, Reinigen und Einstreuen der Liegeflächen), stehen noch nicht zur Verfügung. Wissenschaftler haben errechnet, dass das Reinigen und Einstreuen der Liegeboxen je nach Boxenausführung und eingesetzter Technik zwischen zwei und fünf Arbeitsstunden pro Milchkuh und Jahr beansprucht. Die Lösung könnte ein Entmistungsroboter sein, welcher neben dem Abschieben von Laufflächen auch die Reinigung und das Einstreuen von Liegeboxen automatisiert vornimmt.
Mit der Entwicklung eines solchen Roboters beschäftigte sich eine Gruppe von Forschern und Ingenieuren im Rahmen des Projekts "Weiterentwicklung eines Steuerungsmoduls zur autonomen Führung von Entmistungs-, Liegeboxenreinigungs- und Einstreugeräten (MultiRob)". Projektpartner waren die Peter Prinzing GmbH, das Institut für Landtechnik und Tierhaltung der Bayerischen Landesanstalt für Landwirtschaft und das Institut für mobile Maschinen und Nutzfahrzeuge der Technischen Universität Braunschweig. Die Gruppe testete, inwieweit es möglich ist, einen vorhandenen Spaltenroboter (Pribot 100, Fa. Prinzing) um ein Reinigungsmodul mit ausschwenkbarem, rotierendem Rundbesen und ein Einstreumodul (Behälter für Einstreu mit Förderband) zu erweitern und für den Einsatz im Stall funktionsfähig zu machen. Ziel war die Entwicklung eines marktreifen Prototyps des MultiRobs und der dazugehörigen Software. Das Projektteam musste sich hierzu folgenden Aufgaben stellen:
Eine erste Aufgabe bestand darin, eine technische Lösung für die Kartierung des zu reinigenden Stalles zu finden. Es musste eine digitale Stallkarte angelegt werden, auf der alle Fahrwege und Liegeboxen verzeichnet sind. Neben der digitalen Karte musste ein Lokalisierungssystem gefunden werden, das dem Roboter ermöglicht, seine Lage innerhalb der Umgebung jederzeit zu bestimmen. Das Fahrzeug sollte in der Lage sein, eigene Routen zu generieren und diesen frei zu folgen. Dies ist für die Reinigung von Liegeboxen wichtig, weil sie wiederholt angefahren werden müssen, wenn sie beim ersten Besuch belegt sind. Darüber hinaus müssen die Routen des Roboters durch den Stall exakt geplant werden können.
Eine Herausforderung stellten die übliche Verschmutzung des Stallbodens und der damit verbundene Schlupf der Räder dar. Dies schränkt die zur Verfügung stehenden Methoden der Lageschätzung ein. Im Projekt entschied man sich für die Nutzung von 2D-Laserscannern als Lokalisierungssystem.
Um zu vermeiden, dass der Roboter mit Hindernissen kollidiert, wie zum Beispiel mit Kühen in den Liegeboxen oder auf den Laufgängen, mussten die Entwickler das Gerät befähigen, Hindernisse zu erkennen und gegebenenfalls zu umfahren. Der Roboter musste dazu in der Lage sein, seine Fahrtroute durch den Stall je nach Situation zu ändern.
Ein weiteres Ziel war die Entwicklung und Optimierung eines Austragssystems für Streugut. Mit dem System sollte der Roboter in die Lage versetzt werden, mehlförmige Einstreu, wie zum Beispiel Kalk und Strohmehl auf den Liegeboxen auszubringen - und zwar in einer an das Material angepassten Dosierung.

Kombinierter Roboter zur Spaltenreinigung, Liegeboxenreinigung und -einstreu von Milchviehställen. Bild: TU Braunschweig
Mittlerweile existiert der Prototyp eines voll funktionsfähigen Entmistungsroboters für Laufflächen und Liegeboxen (MultiRob). Das Gerät ist mit einer schwenkbaren, rotierenden Bürste und einem Einstreumodul ausgestattet. Damit ist es möglich, neben den Stallböden auch das hintere Drittel von Hochliegeboxen zu reinigen und die Boxen einzustreuen.
Am Roboter sind zwei Laserscanner angebracht, die eine Reichweite von maximal 25 Metern haben. Ein Laserscanner befindet sich an der vorderen, oberen, linken Roboterecke in einer Höhe von etwa 50 Zentimetern über dem Boden. Er wird zur Vermeidung von Kollisionen und zum Erkennen belegter Liegeboxen eingesetzt. Der zweite Laserscanner ist an der hinteren, unteren, rechten Roboterecke befestigt in einer Höhe von etwa 10 Zentimetern über dem Boden. Er ist für das Aufspüren der Liegeboxenkanten zuständig. Zusätzlich ist an der Frontseite des Roboters ein Schild montiert, das über drei Winkelsensoren laterale und axiale Bewegungen erkennen kann. Auf diese Weise führt das Schild den Roboter beim Reinigen an den Liegeboxen, Laufflächen und Wänden entlang.
Intelligente Algorithmen werten die Sensorik des Roboters aus und erkennen auf diese Weise belegte Liegeboxen oder Hindernisse auf den Stallgassen. So kann das Gerät rechtzeitig ausweichen und seine eigentliche Fahrroute im Anschluss fortsetzen. Abweichungen von den vorgegebenen Arbeitsroutinen werden protokolliert und in der nächsten Fahrt individuell nachbehandelt.
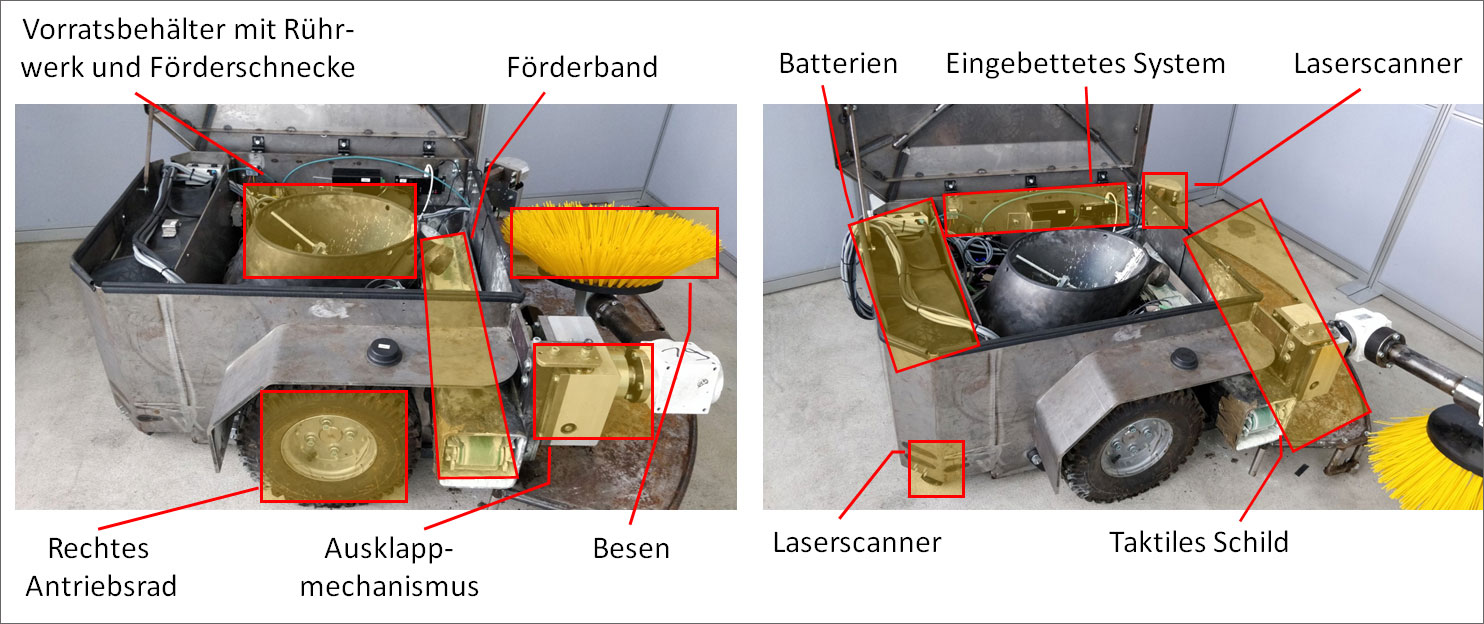
Der mechanische Aufbau des Roboters und die Lage seiner Sensorik. Bild: TU Braunschweig
Vor Erstinbetriebnahme des Roboters im Milchviehstall wird eine Stallkarte erstellt. Dabei wird das Gerät manuell durch den Stall geführt, zeichnet währenddessen eine so genannte Rasterbelegungskarte auf und weist jedem Raster eine Belegungswahrscheinlichkeit zu. Diese reicht von null Prozent (frei) bis einhundert Prozent (belegt). Auf diese Weise entsteht nach und nach ein Rasterbild des zu reinigenden Milchviehstalls, das die Fahrwege des Roboters sowie Liegeboxen, Wände und weitere Sperrflächen aufzeigt. Den Elementen des Rasterbildes können weitere Eigenschaften (Attribute) zugewiesen werden.
Für das Verteilen der Einstreu sammelte das Team Erfahrungen in verschiedenen Versuchsanstellungen: Getestet wurden Kalk, Strohmehl und Kalk-Strohmischungen in verschiedenen Partikelgrößen (0,1 bis 2 cm) und Varianten (entstaubt oder nicht entstaubt, angefeuchtet oder trocken). Die Ausbringungstechnik wurde mehrfach überarbeitet, da sich das Strohmehl im Einstreubehälter anfangs zu sehr verdichtete. Außerdem wurde das Streugut im System nur schlecht transportiert, so dass eine gleichmäßige Verteilung auf den Liegeflächen nicht gegeben war.
Insgesamt dokumentieren die Tests - die zunächst ohne Tierverkehr stattfanden - dem MultiRob eine gute Funktionstüchtigkeit. Sowohl die Software als auch die Technik scheinen solide zu arbeiten und wenig störanfällig zu sein. Im Laufe der Untersuchung wurde das Gerät in Größe und Bauform etwas modifiziert, um seine Funktionssicherheit und Effizienz weiter zu verbessern.
Dauerversuche im belegten Milchviehstall sollen Aufschluss über die Arbeit des MultiRob in der Praxis geben und unter anderem folgende Fragen beantworten: Welche Einstreumenge ist erforderlich? Wie weit streut das Gerät? Wie schnell muss das Förderband des Einstreumoduls laufen, um ein optimales Streuergebnis zu erzielen? Darüber hinaus geht es um die Routengenauigkeit des Roboters, seinen Stromverbrauch sowie um die Arbeitsqualität und -hygiene und um Technik-Tier-Interaktionen. Und es wird überprüft, welche Probleme bei längerem Einsatz auftreten.
LfL Bayern: Spaltenreinigungsroboter zum Reinigen und Einstreuen von Liegeboxen
Letzte Aktualisierung 08.07.2024
Wir verwenden Cookies, um Ihnen die optimale Nutzung unserer Webseite zu ermöglichen. Es werden für den Betrieb der Seite nur notwendige Cookies gesetzt. Details in unserer Datenschutzerklärung.
Datenschutzerklärung
Impressum
